Markus, 10. January 2015
Thanks to all our team mates who did a great job at Techfest 2015 in Bombay, Asia's largest science and technology festival.
We also have some major website update rolling in.
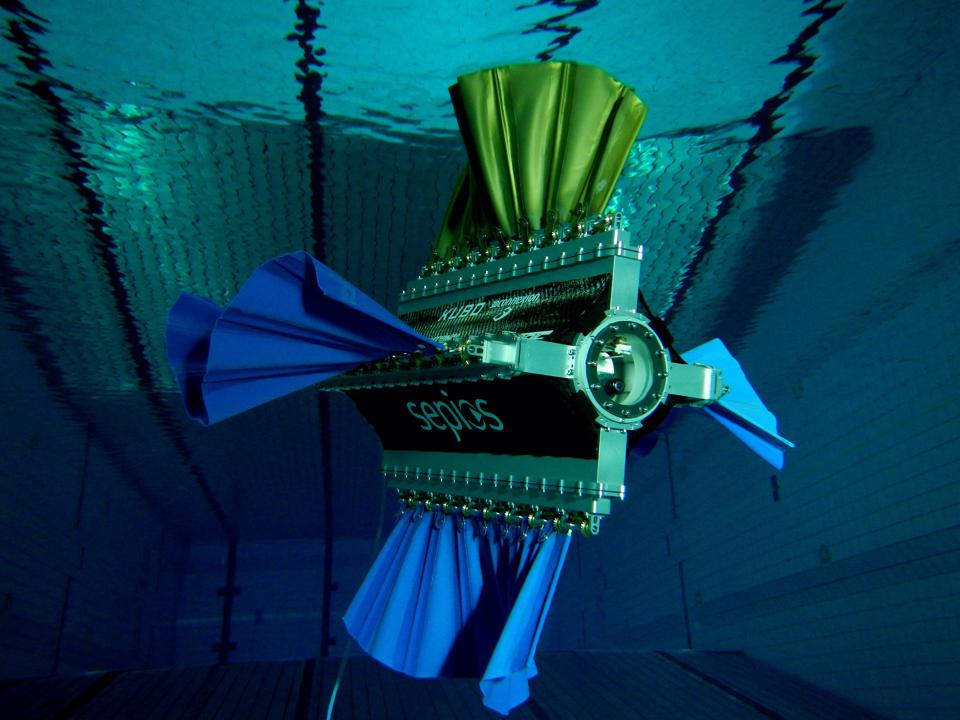
Hi! We are a student project at the Swiss Federal Institute of Technology (ETH) in Zürich. Our purpose is to build a nautical robot which uses a special kind of fins inspired by cuttlefish.
The only four finned cuttlefish robot in the world, Sepios distances itself from classical nautical vehicles with its omnidirecitonality and high maneuverability. These qualities combined with its fishlike appearance and low disturbance are ideal for closing in on fish, making it the ideal device for marine life filming.
See our YouTube channel for stunning material and browse our website for detailed insight.
The Rollout the first public presentation of our project was held on the 27. of May 2014. Many people were fascinated by our robot. But don't worry in case you missed it. The video shown during the presentation can be found above or on our YouTube channel.
You can download our documentation here. Please reference correctly:
Evolution allowed nature to introduce highly effective biological mechanisms that are incredible inspiration for innovation. Humans have always made efforts to imitate nature's inventions and we are increasingly making advances that it becomes significantly easier to imitate, copy, and adapt biological methods, processes and systems. This brought us to the ability to create technology that is far beyond the simple mimicking of nature.
Smart Structures and Materials 2006: Electroactive Polymer Actuators and Devices (EAPAD), edited by Yoseph Bar-Cohen, Proceedings of SPIE Vol. 6168, 616803, (2006) · 0277-786X/06/$15 · doi: 10.1117/12.657514
| Length | 70 cm |
| Wingspan | 95 cm |
| Weight | 22.7 kg |
| Parts | > 4700 |
| max. Depth | 10 m |
| Speed | 1.8 km/h |
| Time | 1 h 30 min |
| Servos | 36 total |
| 9 per fin |
| Battery | 7.4 V (2S) |
| 20'000 mAh | |
| Current | 2 to 40 A |
| Power | up to 300 W |
As of now, our robot is fully assembled and almost operational. What remains is the implementation of software with a plethora of great features. Sepios has many different sensors which have to be coordinated, including a pressure and a humidity sensor. There will also be a camera and laser for collision detection and an Inertial Measurement Unit (IMU) to measure accelerations and angular velocities.
Especially the precise control of the robot proves to be challenging. The final version of the software is supposed to be controllable only by a single 3D Connexion space mouse. The signal is then filtered and combined with the data of our Inertial Measurement Unit (IMU) to control the attitude of the robot. The single force and torque vector is then split onto the individual fins by an allocator which optimizes energy.
Simultaneously we are trying to verify the many points of our list of requirements. Most central to the project: the proof of omnidirectionality. This we are trying to achieve with the combination of an obstacle course and a mathematical proof.
The modular design of our robot allowed the parallel assembling of many parts. Separate sub teams were created to construct the base unit, the fin cases, the fins themselves and an outer shell to provide sufficient buoyancy.
For multiple parts, such as attaching the bevel gears to the respective shafts we used previously designed holders to simplify the process. With couplings and bevel gears we took extra care to make sure they have the required amount of clearance, so as to maximize the longevity of our servo motors. The fins are made of latex which is cut with a laser and then glued onto carbon fiber sticks.
The assembling process was intertwined with one of continuous testing. We took particular care to make sure all the seals would hold to guarantee water tightness, as this is often a very critical factor in the design of underwater robots. We did so by doing several air pressure tests at one bar in a pressure chamber.
The final concept of our robot was set in November. In contrary to the cuttlefish, it uses four fins, to maximize our goal of omnidirectionality. Each of these consists of nine rays, actuated individually by servo motors via bevel gears. In turn, each of these rays has a range of 270 degrees, allowing a fin to also generate thrust in angled stances. This is very useful for certain more acrobatic motions such as barrel rolls. Every fin contains its own servo controller in charge of all the servos. The system is designed to be modular, so that different configurations of fins can be tested. For example mimicking a knife fish, which features one single downward oriented fin or classic two-finned cuttlefish configurations are possible.
The four fins are attached to a single central base unit. This contains the only other actuator, a swim bladder used to assist the robot in staying on a level depth and various sensors. All the data is fed into a National Instruments myRIO device which coordinates these inputs.
Starting at the very beginning of the project we already built prototypes for our system. The first was a boat made of LEGO with a fin pointing downward, already programmed in LabVIEW. Various tests were conducted, including servo durability and water tightness and an evaluation of different fin materials.
During the design phase we took advantage of hours of invaluable counseling from Kubo, regarding our sealing concept, and of the central physics workshop, concerning general manufacturing. With their help we were able to come up with a concept that fulfilled all our requirements while also being realistically producible, easy to assemble and in its entirety water proof. For design of the system was done in Siemens NX employing the precise and comfortable space mice that 3D Connexion provided us with.
Throughout that process even more prototypes were built. Even parts of the finished concept were printed out in 3D to make sure everything combined the way it was supposed to.
Focus Projects always have a very limited budget. In order to still create as good a product as possible, we rely firmly on outside support. Many different companies provided us with valuable product, rebates and advice throughout the project.
KUBO provided us with custom designed, high quality seals to make sure not a single drop of water enters our robot. They also offered us generous advice on how to construct around seals.
National Instruments Switzerland sponsored us one of their state of the art single-board computers and provided useful on-site graphical programming advice.
The Zentralwerkstatt, the mechanical workshop at D-PHYS, ETH Zürich, supported us with their great expertise in manufacturing and engineering.
Swaytronic supported us with high-end LiPo batteries and charging systems.
3D Connexion provided us high-tech 3D navigation space mice to help with our CAD process and to steer our robot in an omnidirectional way.
Qualicut supported us by waterjet cutting many parts for free.
Kami sponsored us our printed team polo shirts.

Hitec sponsored us some amazing high end servos for our robot and they give us a huge discount for the rest of them. This is very helpful because we already bought a lot of these electro motors from Hitec.
2Xideas support us our test trip to France to dive in the sea under real conditions.
ABB funded parts of our aluminum construction.
Hasler sponsored all of our 1800 water resistant screws.
Suter Kunststoffe sponsors carbon fibre plates for our interior.
Alumex anodized all the our 68 aluminium parts in a nice silver.
Distrelec funded a large part of our electronic components.
JKI sponsored us with licenses for their Tortoise SVN LabVIEW tool.
Kundert provided us with rebates on acryl glass.
Jakob Antriebs
Thümer-Teile provided us with distance disks.
Maagtechnic sponsored our pressure hose.
IGUS sponsored us with chlorine resistant bearings.
UTZ helps us store everything we need in comfortable boxes.
Tauchbasis Inauen supported us with diving equipment.
ASVZ supported us with diving equipment.
PUAG sponsored us with a lightweight aluminum transport box.
AMIV Bastli provided electronics laboratory workspace and tools.
We would also like to extend our thanks to:
Fabian Günther, Walter Bachmann, Martin Schütz, Herbert Bieri, André Bitzer, Vincent Audétat & AMIV Bastli
for their valuable contributions to the project.
Would you like to have your logo placed alongside our other sponsors? We are always looking for more people to support us and help us ever improve the robot. In exchange for your support, be it directly financial or in the form of sponsored product, we offer valuable publicity on our website and robot. If you are interested in sponsoring, feel free to contact us at contact@technokrat.ch. We are open for everyone.
As is common for such a project, Sepios is the focus of public attention. Find out who featured Sepios below and don't forget to tell us if you wrote an article about us! Just enter your article on this Google Sheet.
Please feel free to use any of the images you can find on our homepage and videos in YouTube. Please link to our YouTube videos instead of creating your own compilations. If you want to do a compilation by your own please contact us for permission. Thanks for the correct referencing:
Sepios, ETH Zürich
www.sepios.org
You can get high resolution press material on our Google Drive.
| 1.2.2015 | Technology Review | |
| 18.1.2015 | efefuturo.com | |
| 14.1.2015 | Engadget | |
| 12.1.2015 | NewScientist | |
| 7.1.2015 | Gizmag | |
| 7.1.2015 |
Sepios the Nautical Robot inspired by Cuttlefish: Biomimicry |
TechieTonics |
| 31.12.2014 | IEEE Spectrum | |
| 26.8.2014 | XILINX Blog | |
| 23.05.14 | Schweizer Maschinenmarkt (SMM) | |
| 20.05.14 | Watson | |
| 20.05.14 |
ASL sends two focus teams to the rollout presentation on 27th May |
Autonomous Systems Lab, ETH Zürich |
| 19.05.14 | ETH Zürich | |
| 12.05.14 | Sepios - Riding the Wave of Progress (not online yet) | AMIV Blitz ETH |
| 10.04.14 | Sepios – Das Neuste Unterwasser Roboter Projekt der ETH Zürich | KUBO |
| 28.03.14 | Sepios: Nautical Robot | National Instruments |
At the beginning of the third year of studying mechanical engineering at ETH Zürich, the students are offered a choice. Either they continue their studies as normal or they choose to take part in the Focus Project program. Every year multiple projects are offered by various institutes and some, such as in this case, are proposed by students themselves. Project Sepios was initiated as part of this program, supervised by the ETH’s Autonomous Systems Lab (ASL). Our team consists of six students of the mechanical engineering department (MAVT), two electrical engineering students (ITET), as well as one exchange student from the Technical University of Delft in the Netherlands.
We are all very excited to have the opportunity to contribute to such a unique product and are confident that it will be a great success.